Regarding wheel rates, or actually, wheel frequencies; I've always tried to set up my car with the filosophy "get the softest springs you can get away with without running into problems somewhere along the track or limiting your setup flexibility". But recently I started having doubts over that assumption. Oh and we don't get any testing sessions so I'm curious about your thoughts and am interested in the theoretical side before throwing away some of the actual race results
So please enlighten me
Say we have the following situation:
-FWD car
-no aero whatsoever, all low speed <80km/h corners, mechanical grip is focus
-sharp reaction in transient conditions isn't of much concern, tracks don't have chicanes (mostly ovals) and tracks can often be driven fastest with smooth driving
-car doesn't bottom out anywhere
-coilovers don't end up hitting bumpstops
-I'm quite happy with curent suspension geometry and changes in wheel travel (double wishbone), so body roll is not something I necessarily want to reduce
-car is driven on offroad/gravel/dirttrack type surfaces
-we have enough setup range/flexibility to set up the car well balanced
-front unequal length double wishbone, no ARB. rear trailing arm, with additional ARB
Despite the above, are there any reasons why the softer sprung car is worse than having it stiffer sprung?
Now the reason I'm asking is this: our car is (by some margin) the softest sprung car of all the paddock. At some events we've got the fastest car and are in front, often lapping 0.5sec faster at a 20sec lap than the rest of the field. However, once we get to tracks with a lot smoother surfaces we tend to drop back and fight for P5, struggling for midcorner grip (U/S) and some corner-exit traction. And I mean dirt tracks that are black from begin rubbered in, having the tires squeeling.
This has me searching for what fundamental issue we have at these events, compared to our collegues.
Tyres are the same btw, car weight and distribution nearly identical, and we should have an drivetrain advantage. So this has me looking at the spring rates.
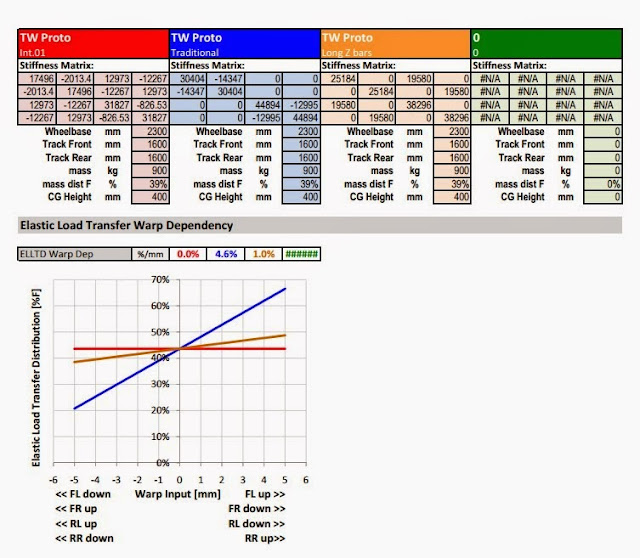
Wheel frequencies our car:
~100 CPM front, ~110 CPM rear
Wheel frequencies competition:
~115 CPM front, ~115 CPM rear
Many thanks for your insights!
-Tom