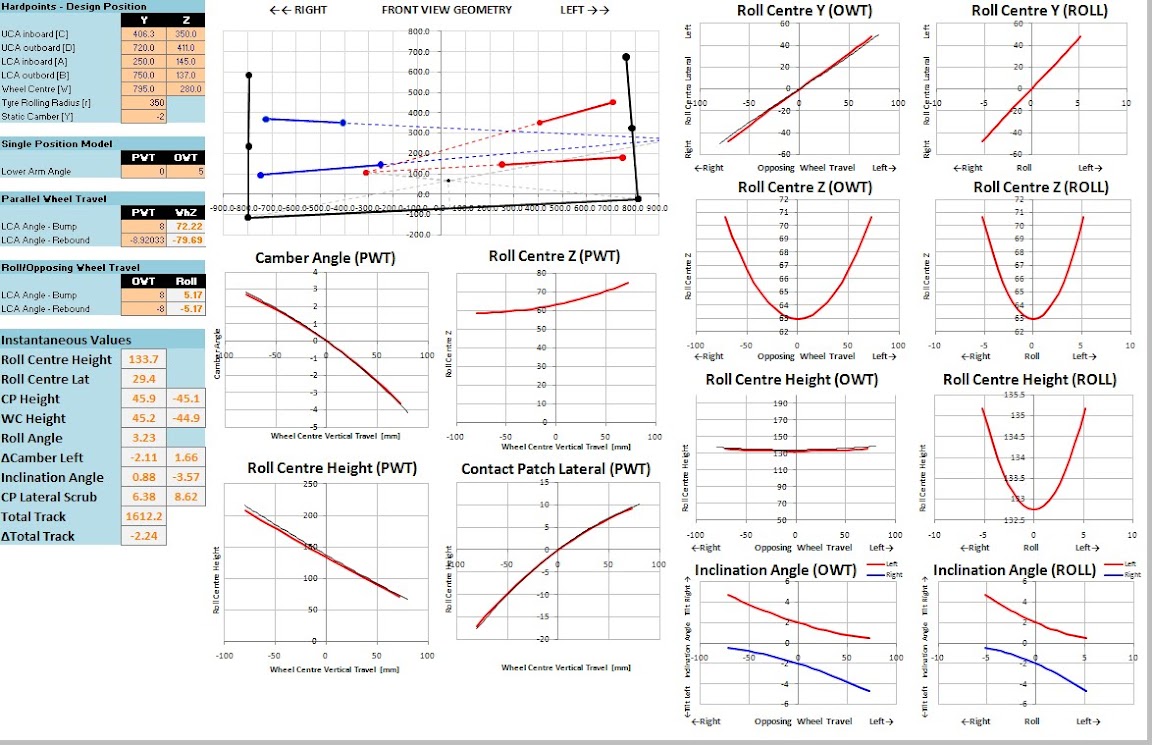
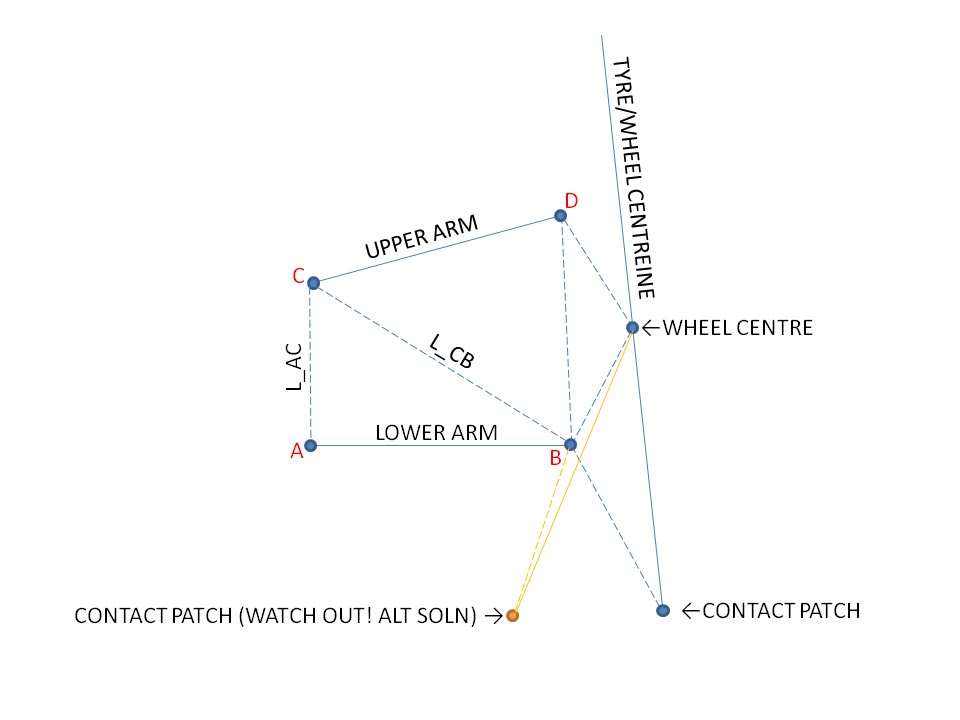
This is very interesting. So you do some basic 2D kinematic calcs in excel to give you things like variations of camber gain, rch, caster etc?Greg Locock wrote:The way I do those is to work in front view and side view in excel. I draw a box where the hardpoints can go, then run massive Monte Carlo sims looking for the elusive best compromise between the various desired outcomes.
The idea to do something like this popped into my head last year while I was manually optimising some push rod geometry in adams. I realised it was largely a 2D problem that excel could solve in milliseconds... But in Adams the loop of changing the hardpoint, simulating and updating the curves in post processor was taking several mintues each iteration. By the end I'd already thrown my toys out of the cot and moved onto another problem without exploring the excel path.
Never heard of the Monte-carlo sim in excel before. A quick google search shows some pretty interesting stuff. This could be pretty helpful for work since I'm working on a new 5 link axle at the moment.
This caught my eye, do you always look at these three things together or did you just give three random characteristics as an example? I'm asking because they all seem relatively unrelated but it reads like you analyse them together.Greg Locock wrote:... for instance when we are looking at RCH vs bump steer vs camber gain, which is something we might tune quite late in a program ...
Cheers
Tim