https://ajsstormer.wordpress.com
is worth a read for the 2 stroke design atmosphere
amusingly there's pictures of the 1960s DMW Typhoon 500 racer (coupled 250 engines)
this was another Brit 'world beater' - but it had truly disastrous vibration despite the 180 deg crank (coupling)
decades later another owner coupled the cranks at 90 deg then 45 deg and solved the problem
Curiously enough, that Villiers/AJS 250 2T engine linked above which had twin carbs on a single cylinder,
has a current echo in a ~80hp 250 2T single cylinder dirt tracker race-kart engine:
As for 2T triples, the Kawasaki H-series race engines (seemingly counter-intuitively) actually
ran richer jetting in the left/right carbs than the centre carb did (which on an air-cooled inline
triple might've been thought to benefit from richer jetting, as an internal defacto coolant),due
- to the rocking couple effect - tending to froth-up the fuel in the outermost carb float-bowls..
"Well, we knocked the bastard off!"
Ed Hilary on being 1st to top Mt Everest,
(& 1st to do a surface traverse across Antarctica,
in good Kiwi style - riding a Massey Ferguson farm
tractor - with a few extemporised mod's to hack the task).
there was a little-known 1938-ish Moto Guzzi 500 transverse 3 (abandoned and never raced) - it gave severe vibration
pre-1950s frames didn't have good resistance to vibration from inertial moment imbalance aka 'rocking couple'
but they had good resistance to vibration from inertial force imbalance
good resistance coming from great stiffness - this postponing resonance until highest rpm
the 1950-90s etc duplex (tube) frames weren't well resistant either to force imbalance or 'RC'
Honda Dream twins had engine-as-frames resistant to 360deg engines producing force-related vibration not 'RC' vibration
and resistant to sportier 180deg engines producing 'RC' vibration but less 'force vibration'
by the 1950s the British had frames resistant to neither
and engines tended to have 'balance factor' over 50% of reciprocating mass .... to alleviate effects due to ....
the frames giving more vibration in the heave (up/down) direction than in the surge (fore/aft) direction
handily, the Atlas becoming the rubber-mounted Commando Norton immediately dropped the BF to 50% ....
this reduced the maximum main bearing loads - so by this alone the crankshaft became 'stronger'
(this gain was then traded for more rpm and power)
it was often implied that the inertial force imbalance at twice engine frequency 'secondary force' is small ....
yes max secondary force is 25% of max primary - if there's no crankshaft counterweight (or counterbalance shaft of course)....
but max secondary force is eg 50% of max primary - if the primary has 50% crankshaft counterweight ie 50% BF ...
and max secondary force is greater than max primary force (in heave) if primary has over 75% BF ....
this can occur in 'classic' British machines modified via high BF for less vibration at high rpm
consider .....
4 cyl car engines rubber isolation-mounting mainly works against secondary force vibration
ie helpfully there's no primary vibration to be isolated
Last edited by Tommy Cookers on 16 Nov 2020, 18:22, edited 1 time in total.
You write: “consider - 4 cyl car engines rubber isolation-mounting mainly works against secondary force vibration”
And against the secondary unbalanced inertia torque vibration (i.e. the moment about the crankshaft axis) on the engine casing.
With a pair of properly-arranged counter-rotating second-order balance shafts (second order: they rotate at double crankshaft speed) the 4 cylinder car engine gets rid of both, the secondary inertia force and the secondary inertia moment about the crankshaft axis acting on the engine casing.
What cannot be balanced is the inertia / idling torque that passes to the transmission: all the four pistons continue to stop simultaneously and to get their maximum speed simultaneously, which means a strong oscillation of kinetic energy (it is what the PatVRA at https://www.pattakon.com/pattakonVRA.htm deals with).
In comparison, a V-4 (say like that of the Honda VFR750) has 70% of the secondary unbalanced inertia force of the “equivalent” (same pistons, same connecting rods, same piston stroke) even-firing straight-four, but it is rid of the heavy secondary inertia torque on the engine casing and in the transmission of the straight four.
The arrangement of the cross-plane-crankshaft straight-four of the Yamaha R1 (that uses one first-order balance shaft) eliminates on one hand the heavy unbalanced secondary inertia force of the V-4, and on the other hand the heavy secondary inertia torque (on both: engine casing and transmission) of the conventional 4-cylinder 4-stroke engine.
By the way:
Several years after the Norton Comando, Yamaha start producing their TDM850 even-firing twin (crankpins at 0 and 360 degrees). Basic part of the engine was a pair of first order balance shafts to cancel out the first order inertia forces:
Later they modified it to the uneven-firing TDM900 with crankpins arranged at 0 and 450 degrees.
Judging from the added parts, weight, cost and complication, it seems that Yamaha was not satisfied by what the elastic mounts can do with the vibrations.
Compare all the previous with the OPRE Tilting of the Portable Flyer
wherein (without balance shafts and without elastic mounts) the mounts of the power unit (i.e. the back-torso of the pilot) are perfectly rid of inertia and combustion vibrations of all kinds and orders.
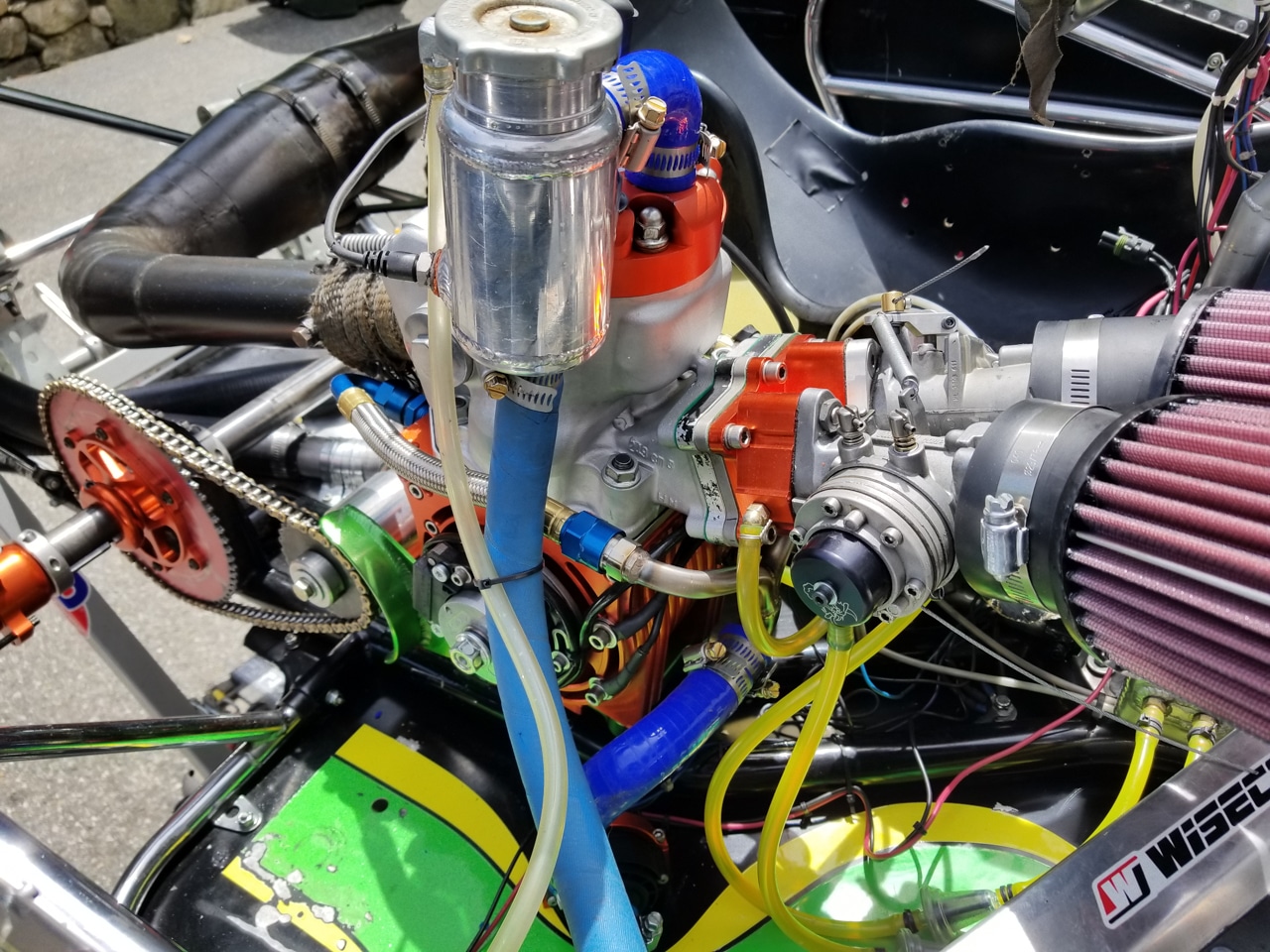
This is one of John’s PK 250s, which features custom billet cases by Rory West of Prokart Racing Karts and a Honda CR250 cylinder. The billet cases allowed for use in the karts, as they don’t utilize transmissions.
How does a kart engine setup differ from a motorcycle-specific configuration? A kart engine has to make really good power from about 5,500 rpm to 10,000 rpm.
What torque numbers does your PK 250 two-stroke make? It’s right in the 35- to 38 foot-pounds area. Now I have a 275cc two-stroke put together. That’s the maximum size two-stroke displacement that you can run.
End of Quote
With 275cc and 38foot-pounds torque, the specific torque is calculated at 20mKp/lit (~200mN/lit).
If you think that without a gearbox, they need a relatively smooth / flat torque curve to compete with the double capacity 4-strokes, the above 200mN/lit specific torque is more than high.
Yes Manolis,
& weirdly enough, Yamaha had - nearly 1/2 a century ago, tried to make an improved
'Commando' 750 - via their TX 750 twin 'omni-balancer twin shaft' (360/0 degree crankshaft)
which was not only overweight & under-powered, but unreliable, perhaps due to 'oil frothing'
issues via numerous chain runs (being both un-tensioned/with excess back-lash) - so its interesting
how they duly substituted gears, for their later attempt - but it was still found to be harsh,
whereas the BMW vertical twin with a 'phantom' 3rd cylinder conrod balance system worked..
"Well, we knocked the bastard off!"
Ed Hilary on being 1st to top Mt Everest,
(& 1st to do a surface traverse across Antarctica,
in good Kiwi style - riding a Massey Ferguson farm
tractor - with a few extemporised mod's to hack the task).
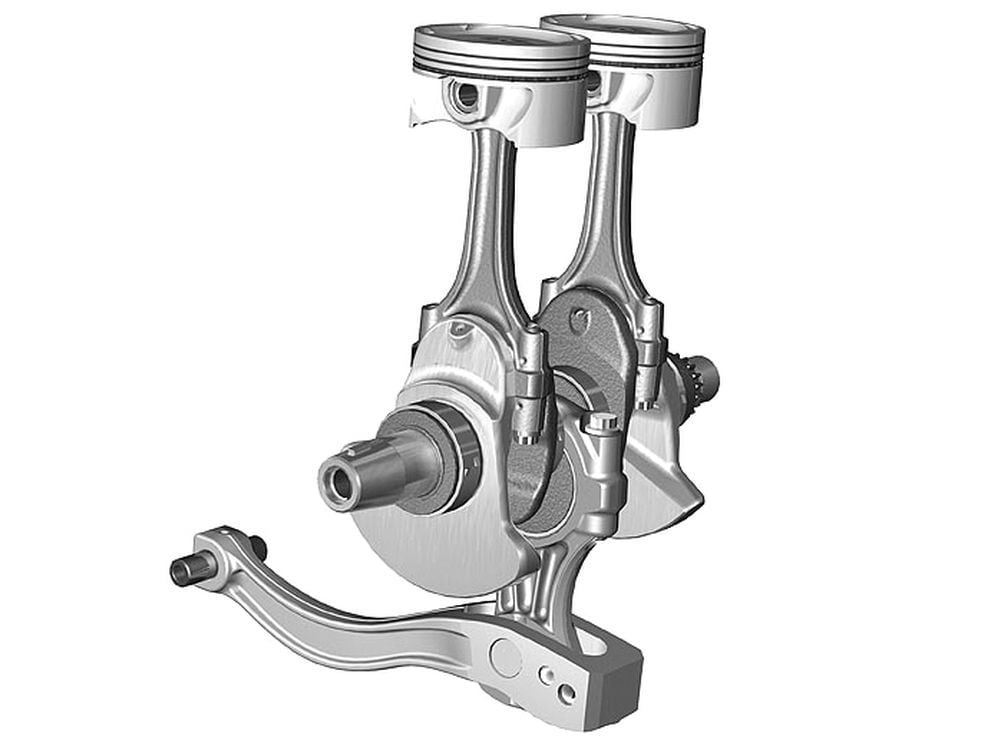
The F800 engine uses a balancing mechanism that’s basically a weight hanging from a connecting rod bolted to a third crankshaft journal, one located between and 180 degrees opposite the two big end journals. This balance weight moves in the opposite direction from the pistons, going down as the pistons rise. The balance weight pivots back and under the transmission, so while its movement is not straight up and down like the pistons, the long arc defined by that pivot makes it pretty close.
This balancer arrangement is superficially similar to that of the Ducati Supermono, which used a V-twin crank and second connecting rod to drive a balance weight composed of a short pivoting arm—but that balanced a single, not a twin. It’s more similar to the Yamaha T-Max maxiscooter. Like the F800, this uses a third connecting rod between the laydown parallel-twin’s two cylinder rods, but this rod faces straight back at the transmission and drives a heavy “slave” piston sliding in its own bore as a balance weight.
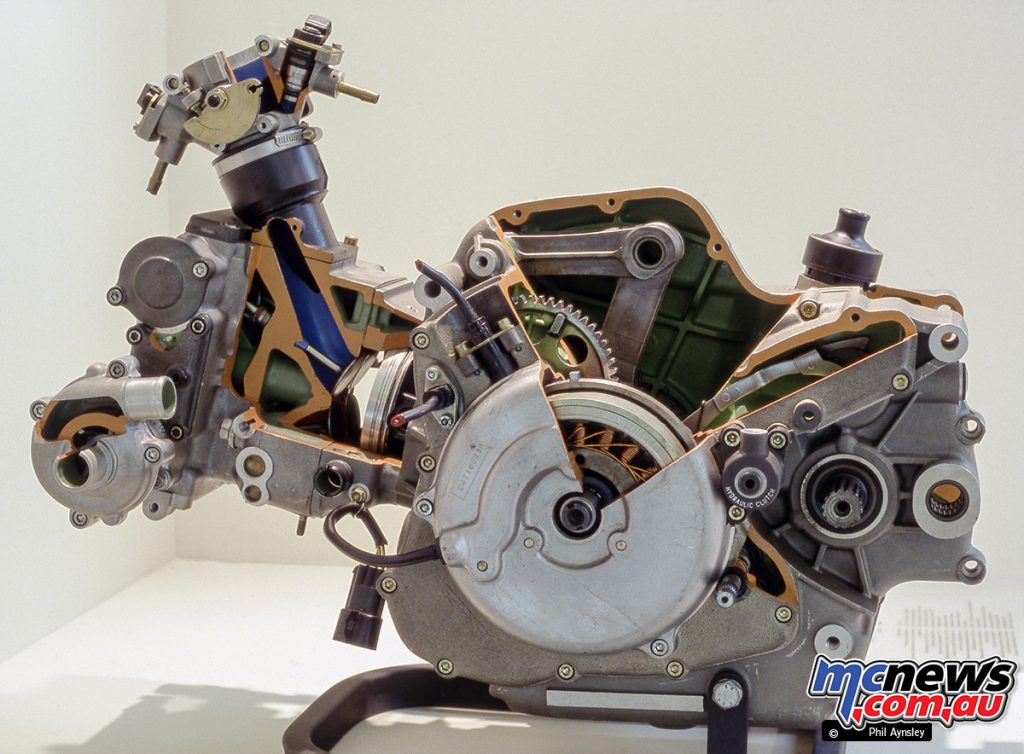
Here is the balance system used in the Ducati SuperMono:
Despite what James Parker writes, the above BMW and Ducati balance systems have big differences. The one focuses on balancing the inertia force (it runs as a boxer), the other focuses on balancing the inertia force and the inertia torque (it runs as a V-2 90 degrees with the one cylinder head removed).
The SuperMono of Ducati could be used in parallel twins, too.
The term "supermono" might have started life to describe a race series for single-cylinder bikes, but in 1993 it became synonymous with the Ducati Supermono that was designed to compete in that class. The 916-derived racer, with styling that made Pierre Terblanche's name famous, was engineered by Massimo Bordi and Claudio Domenicali. All three men would go on to become legends at Ducati, with Domenicali now running the firm, and the Supermono itself was marked out by an ingenious engine that used a dummy cylinder as a balancer, allowing higher revs and more power than its single-cylinder rivals at the time.
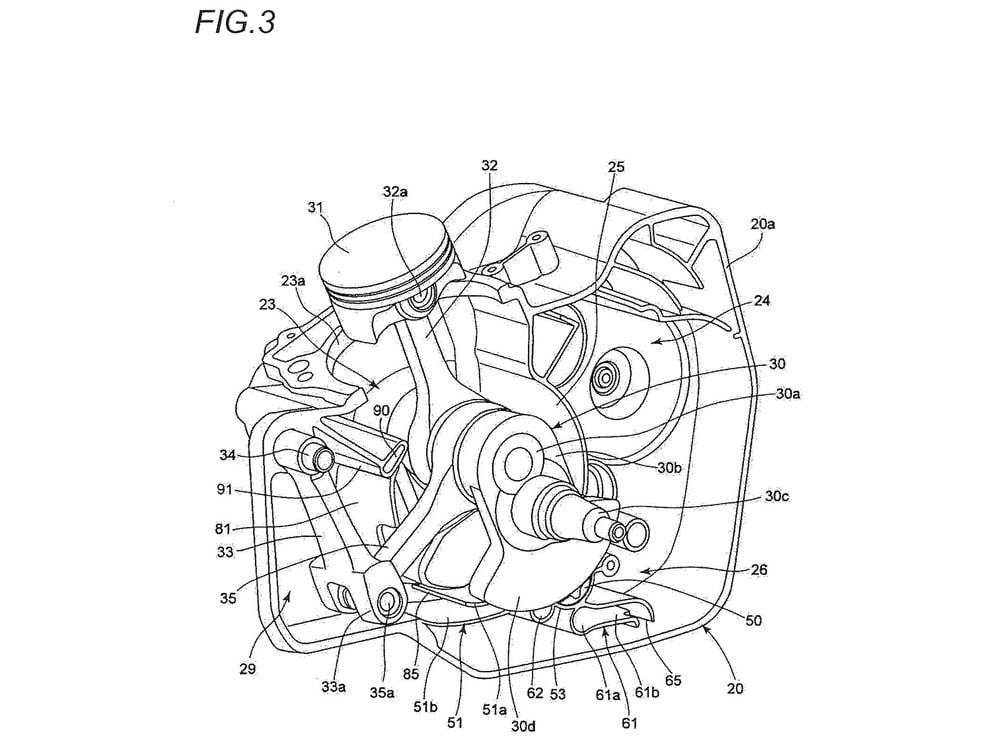
Now Suzuki appears to be trying the same trick, having filed two patent applications for designs that follow basically the same idea that Ducati used in the 1990s.
The latest Suzuki patent application shows a SOHC engine with a single near-vertical cylinder. On the outside it’s unremarkable apart from a slight bulge at the front of the engine cases. Look inside, though, and it’s clear the bulge hides a second, foreshortened con-rod, attached to the same crank journal as the actual con-rod and, at the other end, to a weighted rocker. It’s exactly the same idea that Ducati used, though its Supermono engine was based on an existing V-twin and retained the forward-facing, horizontal cylinder while using the vertical one as the dummy.
Hello Tommy Cookers You write: “consider - 4 cyl car engines rubber isolation-mounting mainly works against secondary force vibration”
And against the secondary unbalanced inertia torque vibration (i.e. the moment about the crankshaft axis) on the engine casing.
With a pair of properly-arranged counter-rotating second-order balance shafts (second order: they rotate at double crankshaft speed) the 4 cylinder car engine gets rid of both, the secondary inertia force and the secondary inertia moment about the crankshaft axis acting on the engine casing.
What cannot be balanced is the inertia / idling torque that passes to the transmission: all the four pistons continue to stop simultaneously and to get their maximum speed simultaneously, which means a strong oscillation of kinetic energy (it is what the PatVRA at https://www.pattakon.com/pattakonVRA.htm deals with).......
....
my point was that cars have nil primary vibration - so their engine mounts don't need to be soft enough for primary isolation
yes conventional isolation-mounting of a chain-drive engine against bad primary imbalance doesn't work ....
as good attenuation (low natural frequency) needs soft mounts - but the chain falls off at maximum vehicle acceleration
is it claimed that the PatVRA is a substitute for 'a pair of second-order counterbalance shafts ?
nothing is transmitted when idling (I presume idle is used meaning the high rpm over-run case with manual transmission)
...yes conventional isolation-mounting of a chain-drive engine against bad primary imbalance doesn't work ....
as good attenuation (low natural frequency) needs soft mounts - but the chain falls off at maximum vehicle acceleration...
Both the following machines feature rubber engine mounts, sans "...chain falls off.." issues.
3 cylinder 120`crank 2T GT750 Suzuki, notably smooth with these rubber engine mounts:
Ed Hilary on being 1st to top Mt Everest,
(& 1st to do a surface traverse across Antarctica,
in good Kiwi style - riding a Massey Ferguson farm
tractor - with a few extemporised mod's to hack the task).
You write: “my point was that cars have nil primary vibration - so their engine mounts don't need to be soft enough for primary isolation”
On the other hand, a car engine has to run at substantially lower revs as compared to a motorcycle engine; it idles at about half revs (say, 650rpm vs 1300rpm); it operates at lower revs; it accelerates strongly from lower revs (say, from 1,500rpm vs 3,000rpm, which makes the actual frequency of the secondary vibrations similar to the frequency of the primary vibrations of the motorcycle engine).
Besides, a car requires a better NVH (Noise – Vibrations – Harshness) than a motorcycle.
You also write: “is it claimed that the PatVRA is a substitute for 'a pair of second-order counterbalance shafts ?”
No.
The PatVRA rids the transmission from the inertia torque. Not the casing.
Typically only useful torque (power pulses torque) passes to the transmission and to the drive wheel(s).
The pair of second-order counterbalance shafts does a different job: on one hand it cancels out the second-order inertia force, on the other hand it cancels out the inertia torque (or moment about the crankshaft axis) on the engine casing. But the inertia torque (due to the motion of the four pistons that stop together and move near their maximum speed together) continues to pass to the transmission.
To put it differently, the two systems complete each other:
A straight-four even-firing engine (say, a typical car engine) with “a pair of second-order counterbalance shafts” AND with the PatVRA on its flywheel, will be as smooth as the straight-six engines, as smooth as the typical V-8 engines, and as smooth as the Wankel Rotary engines (note: there will be a small difference due to the stronger power pulses – and the longer time interval between successive power pulses – of the four-in-line, but this may provide a better feeling).
You also write: “nothing is transmitted when idling (I presume idle is used meaning the high rpm over-run case with manual transmission)”.
Suppose a car with manual gearbox (and conventional 4-cylinder engine) cruises on a level highway at 100mph (160Km/h) / 5,000rpm / 4th gear in the gearbox and 3/4 throttle.
If the driver releases the gas pedal (zero throttle) the engine “continues” to rev at 5,000rpm (with the revs of the engine and the speed of the car falling progressively due to aerodynamic, rolling etc resistance) sending the same inertia (idling) torque to the transmission, but no useful torque.
If the driver presses the clutch pedal (to disengage the engine from the transmission), keeping - with the gas pedal - the engine revving at the same 5,000rpm, then the transmission is released from the idling torque. The difference in vibrations / noise / feeling will be as if having the engine engaged with the transmission through the PatVRA.
If the engine was a typical V-8 (zero inertia torque to the transmission), the release of the gas cable leaves free from loads the transmission (no need to press the clutch).
I.e. what the PatVRA offers to a typical 4-cylinder car (or motorcycle) engine is that, from the transmission point of view, the engine is as smooth as a V-8 (or, say, a V-8 wherein the four cylinders are deactivated).
You also write: “useful diagrams of those lever-type counterbalancers ....”
The various “balancers” invented to cancel out the vibration of some useful arrangements (single, twin etc) show the need for vibration reduction and the problems of the elastic mounts.
Here is the 635cc single crankshaft, single cylinder, opposed piston PatOP engine, standing free on a desk and running on Diesel fuel (17:1 compression ratio).
There are no balance webs, at all, not even on its crankshaft:
Imagine the “Commando” powered by the PatOP engine directly secured (without elastic mounts) on its frame.
A straight-four even-firing engine (say, a typical car engine) with “a pair of second-order counterbalance shafts” AND with the PatVRA on its flywheel, will be as smooth as the straight-six engines, as smooth as the typical V-8 engines, and as smooth as the Wankel Rotary engines (note: there will be a small difference due to the stronger power pulses – and the longer time interval between successive power pulses – of the four-in-line, but this may provide a better feeling).
You write: “nothing is transmitted when idling (I presume idle is used meaning the high rpm over-run case with manual transmission)”.
I should have written ...
nothing is transmitted when idling (idle being the wrong term to use for the high rpm over-run case with manual transmission)
yes I understood that case and that you regarded it as significant
as implied in your words above PatVRA can't eg make the 4 cylinder leopard change its spots ..... and ....
your link P234 shows that the PatVRA (like Yamaha crossplane) would have little effect at road-engine rpm ....
PatVRA benefits come from perturbation of crank:flywheel relationship - so depend on having rather significant flywheel
most PatVRA benefits are absent as road engines have both transmission compliance and transmission shock-absorption
even with race engines transmission compliance is unavoidable
your post P237 suggests crankshaft improvement (from PatVRA) ..... but isn't crankshaft design ......
often dominated by high loads/low rpm and/or important higher (than second) order effect of combustion pressure history ?
@ J.A.W.
neither of the engines you mention has bad primary imbalance
so their ability to retain their chains doesn't invalidate my argument
your link P234 shows that the PatVRA (like Yamaha crossplane) would have little effect at road-engine rpm ....
PatVRA benefits come from perturbation of crank:flywheel relationship - so depend on having rather significant flywheel
Not sure what you are getting at here. Pat VRA works by varying the crankshaft velocity intra-cycle so that it behaves as it would with no (added) flywheel at all ie much faster at TDC when all pistons are stationary. Although the crankshaft velocity is varying dramatically during the cycle, the Pat VRA acts as "variable gearing" to convert this to constant velocity at the output shaft. As such the engine will have smooth output rotation - even with little or no flywheel. I guess it would make sense to attach any flywheel directly to the crankshaft and the VRA system between flywheel and output. This would minimise crankshaft velocity variation and the correction needing to be applied by the VRA.
In addition to what Gruntguru writes, here is a quote from the middle of the page 237 (the post with the crankshaft photos and the plots); the quotes there (actually strictly technical articles from motorcycle magazines) are worth to read:
So, the PatVRA can use a thinner (i.e. having smaller diameter crankpins and main journals) crankshaft without spoiling reliability.
Among the advantages are:
the more lightweight – yet reliable – crankshaft,
the reduced friction (smaller diameter crankpin and journal bearings, no heavy idle loads reciprocating along the transmission),
the quieter / smoother operation (only useful torque passes to the transmission), the springs on the clutch disk can be harder (or completely eliminated),
the better feeling (how well the drive wheels/tires are hooked up), etc.
Regarding the springs on the clutch disk and the possibility to “filter” (to damp) the inertia torque pulses:
The problem is that the dominant Fourier coefficient of the cobustion torque pulses is of second order, i.e. of the same order as the inertia torque pulses that pass to the transmission through the clutch disk and its springs.
If you try to soften (say, by some kind of dampers) the inertia torque pulses that pass to the transmission, you cannot help consuming a part of the useful energy, too.
Quote from the same post:
Suzuki engineers:
“The theoretical advantages of uneven firing order can apply in MotoGP racing, where engine output exceeds 230 horsepower and the biggest obstacle to turning good lap times is cornering traction and the rider’s ability to feel how well the rear tire is hooked up at any given throttle opening. But there are very real inherent engineering challenges that must be overcome with an uneven firing order.
It’s more difficult to produce strong power and torque with an uneven firing order, especially at low rpm and in the midrange.
Vibration is increased, requiring much thicker and heavier crankcases
and
a counterbalancing shaft, and associated mechanical losses contribute to overheating.
The PatVRA:
combines the advantages of both “schools”:
it keeps the flat crankshaft, the even firing and the tune exhaust,
and
it eliminates the inertia torque that passes to the transmission / drive wheel(s).
Hello Tommy Cookers.
In addition to what Gruntguru writes, here is a quote from the middle of the page 237 (the post with the crankshaft photos and the plots); the quotes there (actually strictly technical articles from motorcycle magazines) are worth to read:
So, the PatVRA can use a thinner (i.e. having smaller diameter crankpins and main journals) crankshaft without spoiling reliability.
Among the advantages are:
the more lightweight – yet reliable – crankshaft,
the reduced friction (smaller diameter crankpin and journal bearings, no heavy idle loads reciprocating along the transmission),
the quieter / smoother operation (only useful torque passes to the transmission), the springs on the clutch disk can be harder (or completely eliminated),
the better feeling (how well the drive wheels/tires are hooked up), etc.
Regarding the springs on the clutch disk and the possibility to “filter” (to damp) the inertia torque pulses:
The problem is that the dominant Fourier coefficient of the cobustion torque pulses is of second order, i.e. of the same order as the inertia torque pulses that pass to the transmission through the clutch disk and its springs.
If you try to soften (say, by some kind of dampers) the inertia torque pulses that pass to the transmission, you cannot help consuming a part of the useful energy, too.
yes I had read the writings that you linked on P237
btw these (including the one from a Master's) contain at least 3 faults .....
they wrongly state that the inline 4 .....
inertia torque reaches the road .... and wrongly ....
one of its cylinder's inertia torque is shown as different to the other 3 .... and wrongly ....
are in denial over the crossplane 4's invention in Germany 50+ years ago (it then won 2 world championships)
combustion torque pulses above 2nd order cannot be ignored (eg to benefit the PatVRA) .... because ....
cancellation of 2nd order pulses won't allow change of crankshaft design or of its torsional damper design eg ...
3rd or 4th order torsionals are unchanged - and will cause crankshaft failure if crankshaft or damper capability is reduced
and anyway journal diameters (and so crankshaft design) will probably be dictated by bearing loads
regarding engine inertia torque pulses ..... attenuation by frequency separation isn't attenuation by damping .... isolation from either combustion or inertia pulses involves only tiny losses
some isolation is inherently and unavoidably present eg in the compliance of a transmission's shafts etc
I have never said anything against the PatVRA as enabling what we might loosely call 'the poor man's crossplane'
A centrifugal pendulum absorber does the same job as the PatVRA and it is a much simpler mechanism.
Crankshafts, flywheels and gearboxes fitted with CPAs have been in production for a while..
The issue with both the CPA and the PatVRA is that they are only effective for a given order. As TC rightly says, the 2nd order is not the only important order and this is particularly true for multicylinder engines.
That's why torsional viscous dampers are much more efficient at damping vibrations over a wider frequency spectrum even though they do have the downside of dissipating energy. In reality the energy loss is only a concern when the engine operates through a torsional resonance (high shear between damper flywheel and housing). Everywhere else the losses are negligible.
I suppose another point of discussion is when and why is 2nd order amplitude reduction required?
Particularly in the context of high revving engines I again agree with TC - the frequency of the 2nd order will be very high due to the high speed of these engines. Since the driveline will have a much lower resonance frequency the transmissibility is bound to be very low i.e. the wheel won't feel these pulsations.
As for crankshaft and driveline stresses - they are only of concern if and when the excitation frequency of this 2nd order matches the resonant frequency of the crank-train/driveline. In general the designer will aim that the modes involving crankshaft twist have a high enough frequency that they will never be excited by the dominant engine orders while the driveline is usually designed with a very low natural frequency which either sits below the idle speed or is traversed quickly when the engine has low speed and hence low output.
That is to say in most cases the issues associated with the 2nd order torsional vibration can be designed out so no absorption or damping is necessary.