You write:
“Transition from hover to forward speed will be very tricky with a constantly changing center of pressure and gravity as the body flexes.”
It will be as easy, as simple and as controllable as in the GEN H-4, because the Portable Flyer is a symmetrical and compact GEN-H-4 (with the pilot inside the high speed downwash, offering not only "weight displacemnt control" but also"aerodynamic control").
Quote from https://www.pattakon.com/GoFly/DTR_1.pdf
“Take-off, landing, hovering and cruising
The stability and the controllability at vertical take-off, landing and hovering of the PORTABLE FLYER have no reason to be worse than in the GEN-H-4:
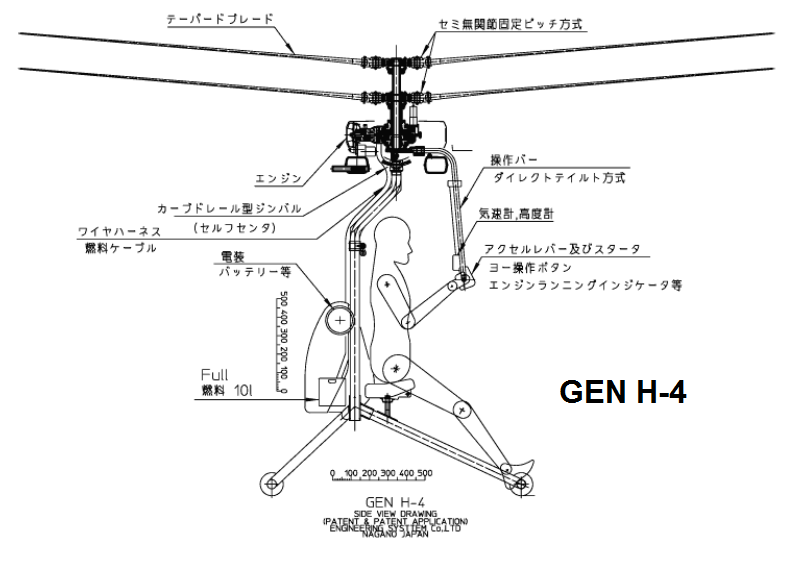
In the above GEN-H-4 the only control is the lever that displaces the center of gravity relative to the rotation axis of the two big (13ft / 4m diameter) contrarotating rotors. The PORTABLE FLYER looks like a symmetrical compact GEN-H-4, and can fly like the GEN-H-4.”
“The stability of the above GEN-H-4 Flyer at the fast take-off (14’’ to 18’’ of the video) is remarkable. At hovering some 30ft / 10m above the ground, the stability is excellent; this excellent stability is achieved without any noticeable effort from the pilot: From 1:02 to 1:15 of the video the pilot of the GEN-H-4 looks around calmly, as if he is seating in a chair in the veranda of his 4th floor apartment. He seems so relaxed that if he had a newspaper with him, he would read the news, too.”
You also write:
“I have no idea how you propose to transition from forward high speed to brake mode....”
See in the following video, from 1':52'' to 2':02'', Fraky Zapata accelerating and then decelerating with his FlyBoard Air.
To accelerate, Zapata leans forwards, so that the exhaust gas from his jet turbines exits downwards - backwards pushing him upwards - forwards.
To decelerate / brake, Zapata leans backwards, so that the exhaust gas from his jet turbines exits downwards - forwards pushing him upwards - backwards.
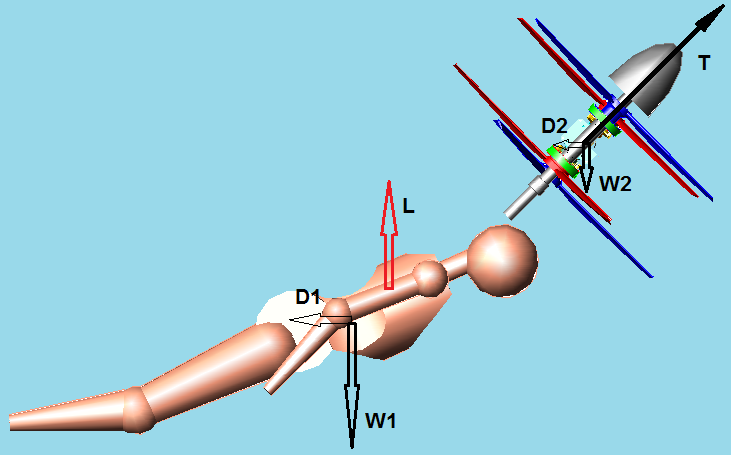
Similarly to Zapata:
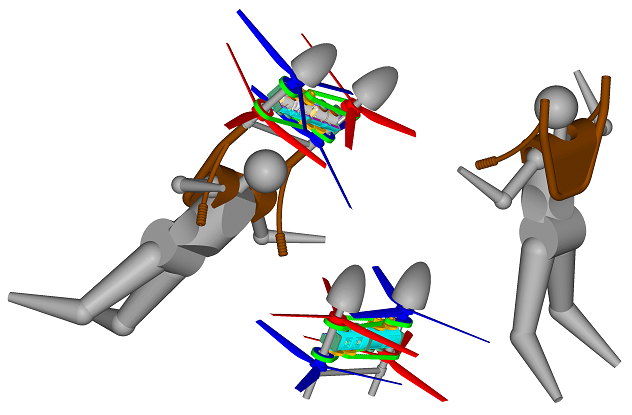
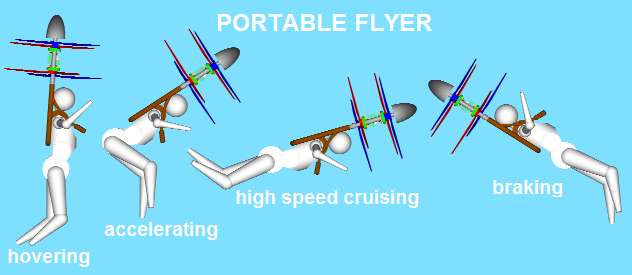
In order to accelerate towards a direction, the pilot / rider of the Portable Flyer leans towards that direction: the rotors provide an upwards force that takes the weight of the pilot / Flyer, and a horizontal force that accelerates the pilot / Flyer towards the selected direction.
In order to decelerate, the pilot /rider of the Portable Flyer leans backwards: now the rotors provide an upwards force that takes the weight of the pilot / Flyer, and a backwards force that decelerates the Flyer.
The big difference from Zapata's FlyBoard-Air is that instead of having the thrust force under the feet of the pilot (and control its direction by pilot's legs / feet), in the Portable Flyer the thrust force is above the head of the pilot and its direction is controlled by his shoulders / torso / arms.
Another important difference is that Zapata at medium-low speeds has not "aerodynamic control", while the pilot of the Portable Flyter has full aerodynamic control at all stages of his flight, from take-off to landing.
Thanks
Manolis Pattakos