Did you see the two independent engines (each driving its own pair of counter-rotating propellers/rotors) of the Portable Flyer?
In case of an engine stall (or of broken toothed belt, or of a fall-apart propeller) the other engine (with its own propellers) allows a safe landing.
So one engine fails and a single pair of propellers is rotating and you really think you will have control by swinging your legs around and can guide it down to a safe landing? You have serious control issues with this machine; please explain single propeller landing and provide some data that there would be enough power and control to prevent a nice roll over and dive into the ground. Get real.
You write:
“I'll stick to my ''personal flyer'' gyro thanks. But next one will more than likely run ethanol, forget batteries, forget fossil fuels.”
For Flying Devices ethanol and methanol fuels have a serious problem: they are “heavy”. Instead of taking the required for the combustion Oxygen from the air, they carry a part of the Oxygen inside their molecules.
Their specific energy (energy content to weight ratio) is low relative to other fuels.
Gasoline specific energy: 47.3MJ/Kg
Ethanol specific energy: 29.7MJ/Kg (i.e. for the same energy content, ethanol weighs 60% more than gasoline).
Methanol specific energy: 22.7MJ/Kg (for the same energy content, methanol weighs more than two times than gasoline).
For instance, if for a specific flight your autogyro needs 40Kg of gasoline, for the same flight you need 64Kg ethanol (i.e. your take off weight increases by 24Kg, i.e. more than two OPRE Tilting engines).
For the same flight you need 83Kg methanol, i.e. you add 43Kg to the take off weight of your gyrocopter.
Ethanol is good for cars / trucks / motorcycles, but too heavy for flying devices.
At the middle of the page 192 of this discussion it is the "Pendulum rocket fallacy" article of Jim Bowery.
Please read it and try to understand it.
If you can’t, let me know to help.
It clarifies, among others, the effect of the center of gravity on the stability of a rocket or of a Flyer.
In case of malfunction of the one engine, or in case one propeller hits an obstacle and falls apart, or in case a transmission tooth belt is broken, or . . ., the “healthy” engine-propellers-set is sufficient for a safe landing.
With the one only engine running at 9,000rpm (mean piston speed: 9m/sec) and driving its two 3-blade 39’’ diameter / 28’’ pitch propellers at 3750rpm (2.4:1 reduction) the total thrust force is calculated at 250lb (115Kp), the tip speed is 195m/sec (57% of the sound velocity), the power required by the running engine is 65bhp (which means: 36.8 lb*ft (50mN) of torque from 21.5ci (350cc) capacity, i.e. 142mN/lt specific torque, which is attainable by a good 2-stroke: the 2-stroke Rotax 850 ETEC provides more than 20% more specific torque (175mN/lt).
End of Quote
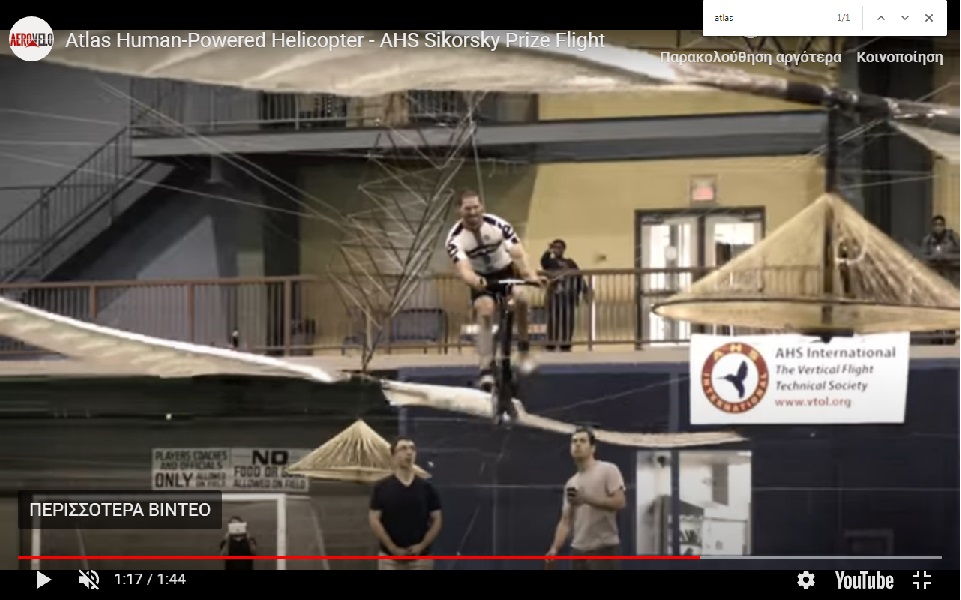
And here is the Atlas human powered helicopter that won the Sikorsky prize:
It is a Portable Flyer with two pairs of counter-rotating propellers.
It flies controllably.
At 1:02 of the video you can see a square on the ground. The rider has to stay inside this 10mx10m square, otherwise he is calcelled.
The following slide is at the 1:17 of the video:
Spot on how much the rider is offset to the left of the image.
Why?
Because his Portable Flyer is near to cross the right side of the 10mx10m square, and desperately tries to correct by displacing his center of gravity relative to the overall thrust axis.
With the one only engine running at 9,000rpm (mean piston speed: 9m/sec) and driving its two 3-blade 39’’ diameter / 28’’ pitch propellers at 3750rpm (2.4:1 reduction) the total thrust.....
I didn't say there was a lack of power, I said you won't be able to control it.
Ahr Manolis, nothing has changed, has it. When I see you fly at 1500 feet in your ''personal flyer'' , suffer an engine out and land safely, I will take you as credible, until then.
Ahr Manolis, nothing has changed, has it. When I see you fly at 1500 feet in your ''personal flyer'' , suffer an engine out and land safely, I will take you as credible, until then.
Get your facts straight on ethanol.
Can you straighten out his facts on ethanol? As a courtesy for others, we may be running off the same info? I remember when e10 and e85 became available it was certainly fun to tune and setup turbo cars but it was so long ago I don't remember mpg and probably didn't care much at the time(it was all about more boost and more timing with less knock, ohh and decent egts too). As of late my friends are running e85 in high strung n/a track cars and having great results but I do believe they report wishing more tracks had e85 available as their cars are fairly thirsty. Can you comment is this a factor of how their cars are tuned, or related to the actual energy density of the fuel?
..... facts on ethanol?
..... the actual energy density of the fuel?
as MP says ethanol (and methanol) are very poor regarding fuel weight (for aviation)
but higher alcohols eg butanol (used as the mandatory bio ingredient in recent F1) aren't
plus eg butanol also has outstanding energy per unit air
compared to gasoline ...
ethanol/methanol are c.5%/10% better IN ENERGY PER UNIT AIR - but 0% better IN ENERGY PER UNIT VAPOUR MIXTURE
because gasoline VAPOUR displaces c. 7% of engine air but ethanol/methanol VAPOUR displace 11%/15% of engine air
this if and to the extent that vaporisation occurs before combustion
importantly F1 DI prevents such premature fuel vaporisation (and current F1 isn't air-limited as NA F1 was)
those silly old carbs or low pressure injection used in the old days weren't at all silly
eg for this reason touring car race-legal high pressure Kugelfischer injection gave less power than SU carbs
Last edited by Tommy Cookers on 14 Apr 2020, 12:49, edited 1 time in total.
Can you straighten out his facts on ethanol? As a courtesy for others, we may be running off the same info? I remember when e10 and e85 became available it was certainly fun to tune and setup turbo cars but it was so long ago I don't remember mpg and probably didn't care much at the time(it was all about more boost and more timing with less knock, ohh and decent egts too). As of late my friends are running e85 in high strung n/a track cars and having great results but I do believe they report wishing more tracks had e85 available as their cars are fairly thirsty. Can you comment is this a factor of how their cars are tuned, or related to the actual energy density of the fuel?
Well thing is, Ethanol has like any fuel specific disadvantages and advantages. Manolis is right to point out the lower energy density. However, this disadvantage isn't as significant as the pure energy content would suggest.
Ethanol has a higher octane number and so allows you to run higher compression ratios, higher boost or more agressive ignition timing without running into knock. This results in a higher thermal efficiency which partialy negates the lower energy content. In reality the fuel consumption is at worst 30% higher by volume with Ethanol compared with petrol, on average under normal loads it's about 10-15% more.
Because more Ethanol is needed it also generates a better cooling effect when it vaporizes compared to petrol. Most petrol engine in road cars use something called "full load enrichment" when on WoT. Basically you enrich the mixture to have more cooling, to prevent the pistons from melting. However, this also comes with some problems. First of all because you go away from stoichiometric, the additional fuel doesn't do much in terms of poweroutput, because there's simply no oxygen to properly react. Also catalytic converters don't like that very much and will temporarily stop working. So in short it's inefficient and dirty.
Good points Dr A. Key to ethanol's BSFC being better than the 60% increase you would expect is its ability to run closer to stoich at WOT cf gasoline. This is due to three factors AFAIK.
- Cooling as you mentioned.
- Detonation control with lower enrichment levels
- higher flame speed and at leaner AFR
..... facts on ethanol?
..... the actual energy density of the fuel?
because gasoline VAPOUR displaces c. 7% of engine air but ethanol/methanol VAPOUR displace 11%/15% of engine air this if and to the extent that vaporisation occurs before combustion
This neglects "shrinkage" of the charge due to evaporative cooling. I did the calculations some time ago and found the "shrinkage" more than compensated for the vapour displacement in the case of gasoline, ethanol, methanol and water. I will re-check those calculations.
Last August Franky Zapata standing on his FlyBoard Air succeeded to cross the English Channel (Calais).
He used kerosene as fuel for his turbines; and because the jets are too thirsty, he had to refuel at the middle of the channel.
He started carrying 50lit (40Kg) of kerosene on his back, and at the middle of the channel he refueled with another 50lit (40Kg) of kerosene to complete his flight.
See from 00:30 to 1:00 of the video.
If Zapata had to use ethanol instead of kerosene as fuel, he should start carrying more than 64Kg on his back, in a substantially larger “fuel tank”.
While 64Kg ethanol has as much energy as 40Kg kerosene, the additional 24Kg of weight require more thrust from the engines, i.e. more power, which consumes energy faster, which means that more than 64Kg of ethanol are required to replace the 40Kg of kerosene.
But Zapata cannot carry such a weight on his back (and, probably, his FlyBoard Air cannot take off, or be controlled, with all this additional weight, which may require more powerful jets for the take off, which in turn means even more ethanol fuel is necessary for the same range).
The other alternative would be to increase the refueling stops from one to two (or, most likely, three).
On the contrary, if there were another fuel having double energy density (MJ/Kg) than the Kerosene, then Zapata would really had cross the Channel without refueling.
You write: "When I see you fly at 1500 feet in your ''personal flyer'' , suffer an engine out and land safely, I will take you as credible, until then."
I wonder what is my business (and Zapata’s, and Mayman’s, and Browning’s business) at 1500 feet.
My business is to fly at 1,500mm (1.5m, 5feet) from the ground and from the sea waves.
By the way, isn’t Zapata the most elegant and spectacular and graceful figure in the sky?
Can you straighten out his facts on ethanol? As a courtesy for others, we may be running off the same info? I remember when e10 and e85 became available it was certainly fun to tune and setup turbo cars but it was so long ago I don't remember mpg and probably didn't care much at the time(it was all about more boost and more timing with less knock, ohh and decent egts too). As of late my friends are running e85 in high strung n/a track cars and having great results but I do believe they report wishing more tracks had e85 available as their cars are fairly thirsty. Can you comment is this a factor of how their cars are tuned, or related to the actual energy density of the fuel?
Well thing is, Ethanol has like any fuel specific disadvantages and advantages. Manolis is right to point out the lower energy density. However, this disadvantage isn't as significant as the pure energy content would suggest.
Ethanol has a higher octane number and so allows you to run higher compression ratios, higher boost or more agressive ignition timing without running into knock. This results in a higher thermal efficiency which partialy negates the lower energy content. In reality the fuel consumption is at worst 30% higher by volume with Ethanol compared with petrol, on average under normal loads it's about 10-15% more.
Because more Ethanol is needed it also generates a better cooling effect when it vaporizes compared to petrol. Most petrol engine in road cars use something called "full load enrichment" when on WoT. Basically you enrich the mixture to have more cooling, to prevent the pistons from melting. However, this also comes with some problems. First of all because you go away from stoichiometric, the additional fuel doesn't do much in terms of poweroutput, because there's simply no oxygen to properly react. Also catalytic converters don't like that very much and will temporarily stop working. So in short it's inefficient and dirty.
Ok so does this mean tuning on ICE with ethanol can overcome its weight disadvantages in aircraft applications? Remember, I hinted at my understanding, i.e. lower egts, knock reduction, and higher boost and/or advancing timing, all things which have garnered faster lap times from my peers/customers, but it still doesn't address the Manolis comment. Is ethanol a suitable fuel source for aircraft, assuming all those benefits? This isn't a bait and switch I am honestly curious , and I have some skin in the game (not just commentary but actual risk i.e. an aircraft of my design taking flight and choosing fuel sources)
So does ethanol's benefits outweigh its faults in an aircraft? Sure I could do the math for myself, but yall are pretty keen and more wise than I, by far, by miles, by km, by light years. I am a merely a designer, the butt of well deserved jokes.
So what is it, if you were building an ICE powered aircraft, and influencing your client on critical choices, what would it be.... Keep in mind, your comments influence what actual fuel ends up in the wings of and airplane. Are we building compact turbocharged 4 stroke tuned to extract the maximum from ethanol or sticking with gasoline, or even av gas to keep this bird in the sky the longest on the maximum weight requirements?
I wonder what is my business (and Zapata’s, and Mayman’s, and Browning’s business) at 1500 feet.
My business is to fly at 1,500mm (1.5m, 5feet) from the ground and from the sea waves.
flight closer than 500 ft from people, vehicles eg vessels, buildings, various animals etc is illegal
I've been interested in this picture for some years. Perhaps this forum has the knowledge to answer my questions. How does underneath 2-stroke v4 work with regards to port timing, sharing a sump for each 2 cylinders. As you can see the conrods seem to share pin position, but not the actual pin. Does the crank lob in between the pins cause a separate sump per cylinder? It's so much more compact then the 500cc V4's of motor cycles back in the day.