A FBD is always useful to snapshot a moment in time. The system does not need to be in static equilibrium.
The question is how many “moments in time” are required to correctly describe the “running of the runner” or the “walking of a person” or . . .
Thousands?
I would say Millions.
Those who persistently ask for “force diagrams” do really understand what they ask?
Thanks
Manolis Pattakos
That is not the point. One moment in time is sufficient to determine what the flyer will do with no pilot inputs. From there it is easy to determine what the next pilot input needs to be to regain - for example - a stationary hover.
“One moment in time is sufficient to determine what the flyer will do with no pilot inputs. From there it is easy to determine what the next pilot input needs to be to regain - for example - a stationary hover.”
Let me show my point with an example:
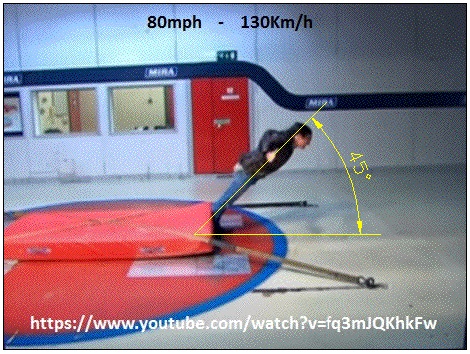
In the above slide (instance) from a youtube video, none of the feet of the runner is abutting on the ground.
Differently speaking, at the specific instance the runner is – literally – flying.
What the FBD can say or show?
The only force (suppose no aerodynamic resistance) is the weight of the runner acting at his center of gravity.
Is the above "moment in time” and FBD sufficient to determine what the runner will do the next instances?
What is required in order to predict / to calculate the next "instances" is the velocity of each individual piece of mass of the runner (initial conditions), also what his brain is commanding (or has commanded) every one of the muscles of the runner and the delay of the muscles to respond. These cannot be shown in a FBD or in a "Force diagram".
As for the “with no pilot input”, think what happens when a person is walking and his brain is “switched off” (blackout) for half a second. He/she collapses.
So my question:
“Those who persistently ask for “force diagrams” do really understand what they ask?”
Is well justified.
The brain is a great control system: it receives continuously a huge quantity of information from the “sensors” it is connected to, it evaluates the situation and it commands the muscles of the body to properly respond in order to achieve what the brain is planning (or planned a few instances ago).
The brain is so good in sensing and controlling, that it makes (intuitively) an instability seem as a “rock stable” stability.
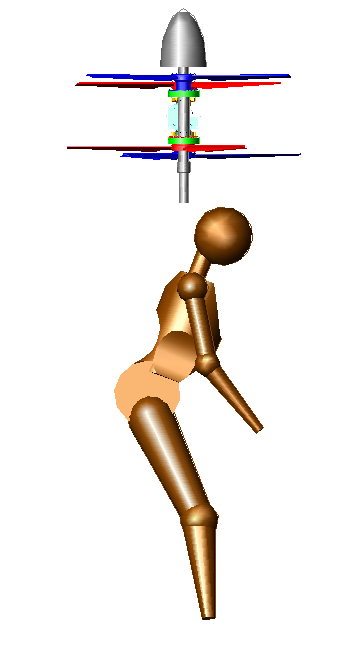
Hi Manolis. The arrow above each FBD is just to indicate the direction the body will tend to rotate.
The analysis assumes the flyer thrust is sufficient to maintain altitude ie vertical component of thrust = Mg.
The two FBDs are intended to illustrate a thrust pivot point either above the CG or below the CG. If the pivot is at the same height as the CG, the pilot cannot control rotation through re-alignment of the thrust axis - he can only use the aerodynamic effect of realigning body parts in the prop-wash. (Zapata can apply strong roll and pitch moments to the system (in hover) without access to a prop-wash).
Comparing the "above CG" pivot to "below CG" (imagine the "hinge" is locked), the latter has a stability advantage because it tends to rotate the thrust vector towards vertical, opposing the lateral acceleration.
Furthermore,imagine a situation where the flyer in a stable hover with thrust axis vertical and CG directly below, begins to tilt. If the broomstick pilot pushes against the stick to push his body towards the vertical (an intuitive action), he is also tilting the thrust axis away from the vertical which will tend to rotate the system back towards vertical as in the FBD.
In the same situation with the shoulder mounted flyer, the pilot must try to incline his body further from the vertical (non-intuitive) in order to apply a restoring torque to the system. However, if the pilot has hand grips positioned below the pivot the action will be much more intuitive - (falling forward - push, falling back - pull).
If the pivot is at the same height as the CG, the pilot cannot control rotation through re-alignment of the thrust axis - he can only use the aerodynamic effect of realigning body parts in the prop-wash. (Zapata can apply strong roll and pitch moments to the system (in hover) without access to a prop-wash).
The center of gravity is not fixed, i.e. it cannot permanently coincide with the center of the pivot (unless the pilot is frozen or dead).
By lifting / bending his legs, the pilot of the Portable Flyer (at right in your FBD) elevates the overall center of gravity relative to the “pivot” / thruster (i.e. relative to the Portable Flyer).
By straightening his legs, the pilot lowers the overall center of gravity (relative to the thruster or pivot, again).
By bending his waist backwards or forwards or to the sides, the pilot shifts the overall center of gravity around (always relative to the engines / propellers of the Portable Flyer or relative to the pivot).
Similarly for the arms / head.
Worth to mention here:
In the case of the Portable Flyer, the eccentricity of the overall center of gravity from the pivot is some ten times smaller than what your FBD shows at right.
In the “weight displacement control”, the center of gravity “plays” around the thrust axis (actually the thrust axis “plays” around the center of gravity). Excluding the yaw, the control is full.
Then it comes the “aerodynamic control” to reinforce and complet e (yaw) the “weight displacement control”.
You also write:
“Comparing the "above CG" pivot to "below CG" (imagine the "hinge" is locked), the latter has a stability advantage because it tends to rotate the thrust vector towards vertical, opposing the lateral acceleration.”
At the middle of the page 192 it is presented the “Pendulum Rocket Fallacy”.
If the hinge is locked, none of the two cases of your FBD is “stable” (this is what the Pendulum Rocket Fallacy claims). More correctly: none of the two can maintain its direction: they will soon turn and fall hitting the ground.
If the hinge is unlocked, again none of the two is “stable” (this is what the Pendulum Rocket Fallacy says). As before, none of the two can maintain its direction; they will turn and fall to the ground.
In order to be “stable” (“stable” in their instability), they need something (or someone) to properly – and continuously - vector the thrust.
And this is exactly what the living pilot does: he vectors the thrust so that the thrust axis to be to the left, to the right, forwards, backwards etc of the overall center of gravity, correcting his "instability".
From a different viewpoint:
For the case with the pivot “below CG” (your FBD, at left), let’s agree that initially the thrust vector does rotate towards vertical, and that after a while it becomes completely vertical; what stops it from further rotating?
According the “Pendulum Rocket Fallacy”, the lower of higher center of gravity is, for the “stability”, the same.
You were saying the same in your following post at page 187:
Mayman:
But the pilot has to be on top. So the thing is literally dynamically unstable. Inherently unstable. And it has to be flown by computer. So that's what we're building. And the prototype is exactly that. The engines are clustered together, we purposely put the weight above that, and then we try to fly it.”
This is nonsense. In a hover situation with an axial thruster, the stability is the same no matter how low or high the CG might be relative to the thruster. An axial thruster always exerts its force along the same axis as that axis tilts. Although somewhat non-intuitive the situation is not the same as a parachute where the thrust remains upwards as the system tilts. (A parachute needs to be above the CG)
“Comparing the "above CG" pivot to "below CG" (imagine the "hinge" is locked), the latter has a stability advantage because it tends to rotate the thrust vector towards vertical, opposing the lateral acceleration.”
As you say - it is not stable - but it does have a "stability advantage". This makes it more controllable - as do the handlebars located below the hinge.
Your aim should be to build a bicycle. Once mastered - it is easy to build a unicycle version for the experts. Most sales will be bicycles.
I know this video isn't directly relevant, but the visual of him holding the wings had me thinking of the Manolis project.
I agree with the bicycle/unicycle analogy. I built some linkage forks for bikes, tried some very weird rake/trail, after months or years I could optimize, but never really gained the confidence I built from my youth riding telescopic suspension. I eventually optimized the linkage setup around typical telescopic movement and it was the best setup I had, it was even marketable, someone else made it and it sells. I remember hearing a quote from a rider after riding a top level 2 wheel motorcycle equipped with an alternate front suspension saying 'if you trained someone as a child to use this they would be faster'. If that is how it is at the bleeding edge of the bell curve you have to develop product around a much broader window to be successful in mass. People can learn to kickflip a skateboard, it can take a day for many, years for some, but if you really want to learn you can, and likely only one trip to the hospital at worst. Even more people can learn to take off and land a powered parachute, yet 1/1000000th people ever try. Why? Well if you fail on one task you may die, the other you may scuff your elbow or sprain and ankle. These sort of thoughts have to come into play when entering any market.
Many have gotten muddled into the complicated physical and kinematic arguments about control of flight, I'm not smart enough to say, but stand by the above, great products which catch on to the greatest degree, which involve human input, have some basic limits to human control which attempts to reduce risk or accomplish some goal, be it transportation or joy of operation, or labor reduction, and even others a combination of all of the above... Very few have succeeded where death is the result of the humans immediate inability to have an intricate grasp of humans orientation in space. If somehow the Manolis Personal flyer could be operated in such a way where ones dead operation resulted in a perfect hover in many wind conditions assuming a fixed pre determined power input that would be a start. Many planes fly a wind influenced heading with a dead stick assuming some human or autopilot got it to that point.
TLDR: I think it makes sense to refine control inputs besides that of the humans ability to move their mass in relation to a thrust vector. Maybe someones will marry poppins their way, but too few to be debatable. Far fewer than those who ordered their gyro-copter plans, and even further fewer than those who built and flew their own.
As you say - it is not stable - but it does have a "stability advantage". This makes it more controllable - as do the handlebars located below the hinge.
But, does the “pivot below CG” really have a “stability advantage”?
Case of high speed cruise.
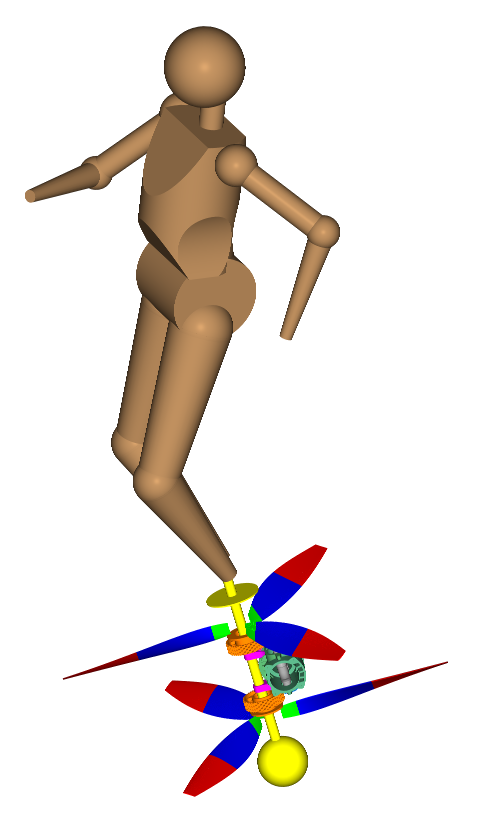
Zapata has the thrust under his feet, just like this Broom version:
The pivot is at pilot’s ankles (pivot below CG).
At high speed cruising, Zapata has to lean substantially forwards; the aerodynamic resistance (drag) on his body is substantially ahead / above the pivot.
At a disturbance (say a gust of wind, an opening or closing of the “throttle” etc) the equilibrium changes; the drag and thrust “pair” tends to rotate Zapata so that the drag to go behind the thrust.
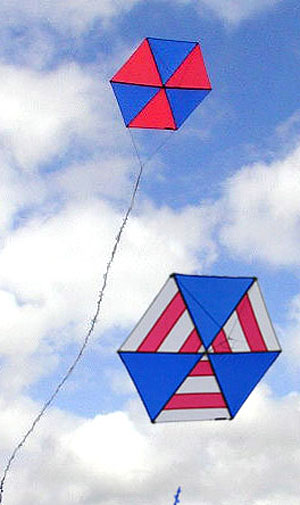
A kite flies with its tail always behind:
Like the kite, the Portable Flyer at high speed cruising “corrects automatically” the disturbances because the drag is behind the pivot. The drag and thrust pair tends to keep / restore the device at its previous position.
In a fast wind, a guy who is hanged by his hands from a fixed point leans as much as the wind commands, and remains stable:
but the guy who walks against the wind, is unstable (his support point is behind the drag): if the wind stops, he falls face down, if the wind increases he turns upwards and then he falls back:
By the way, the first video is for more than two times stronger wind.
Case of hovering
Zapata uses his feet to displace the thrust faster and more widely. The question is whether this is good.
The Fly-Board-Air of Zapata weighs 20Kgf (44lb) and its center of gravity is at a distance of more than 1m from the center of gravity of the pilot.
The Portable Flyer weighs the same and its center of gravity is at a distance well less than 1m from the center of gravity of the pilot.
What is necessary at hovering, is the pilot to feel to where he leans and in response to turn the thruster properly to cancel out the leaning at its beginning.
In both cases the pilot keeps the thrust quite close to the overall center of gravity, displacing / turning it smoothly (see the videos of Zapata how close to his center of gravity is permanently the thrust).
If, for some reason, the eccentricity of the thrust from the overall center of gravity becomes too large (too large means: no more than 0.1m for the Portable Flyer and more than 1m for the Zapata JetPack), the pilot has to react immediately, otherwise he may tumble.
With some 10 times smaller maximum eccentricity, the Portable Flyer appears substantially more stable.
Do I miss something?
Where the improved stability of the Zapata JetPack comes from?
There are many tools in the quantitative analysis and modelling toolbox, FBD, rigid body modelling, simulation software etc etc. One tool you wont find however is pictures of kites, animals and babies downloaded from the internet.
In manolis defense, this is quite quantitative by his standards - quite an improvement from the baby photo. Notice how he has inscribed 45 degrees on the picture and shown a speed measurement.
As the old saying goes, the exploration of the parameter space of flight dynamics begins with a single data point!
True. Still, increase the wind tunnel speed and decrease the angle; nothing new here. It's interesting that this person is being held up by kite lift, not aerodynamic lift. manolis insists his machine will use the human body as a wing to produce lift but the reality is any lift will be kite. Long, long ago on the thread we talked about power requirements for lift as the angle of flight decreased. I like to look at things in a calculus sort of way, one extreme and then the other; the actuality is usually somewhere in between. As manolis' flyer approaches horizontal flight the component of lift provided by the motor decreases with a sine function; flying totally horizontally the lift component from the motor is zero and if the Bernoulli lift is zero the flyer will simply descend to the ground. manolis has not demonstrated nor quantified the lift component from a trailing human body and I think this is a serious mistake. In honor of manolis' constant theme of showing pictures, etc, here's what happens when you lose lift.... https://youtu.be/0HJ4z1jGEcA