Hello Tommy Cookers.
You write:
“isn't this what would have killed Mr Mayman ? (as I said a year or so ago)
(had he not chosen to fly over shallow water with rescue divers 50m behind)”
Do you, or anybody else, know about the spin of his turbines?
I.e. are the turbines of Mayman spinning at the same direction, or are they counter-rotating?

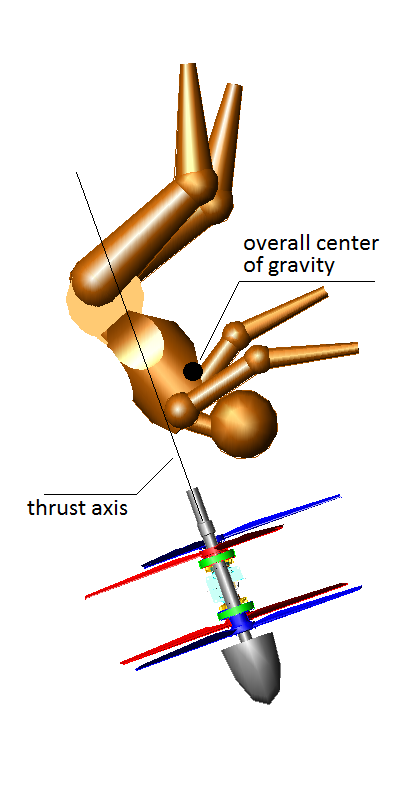
If they spin at the same direction, the gyroscopic rigidity of the turbines is a significant problem. They may have lightweight shafts, with mass at small eccentricity, however they run at high rpm.
The specifications of the JetCat P550 used in some JetPacks :
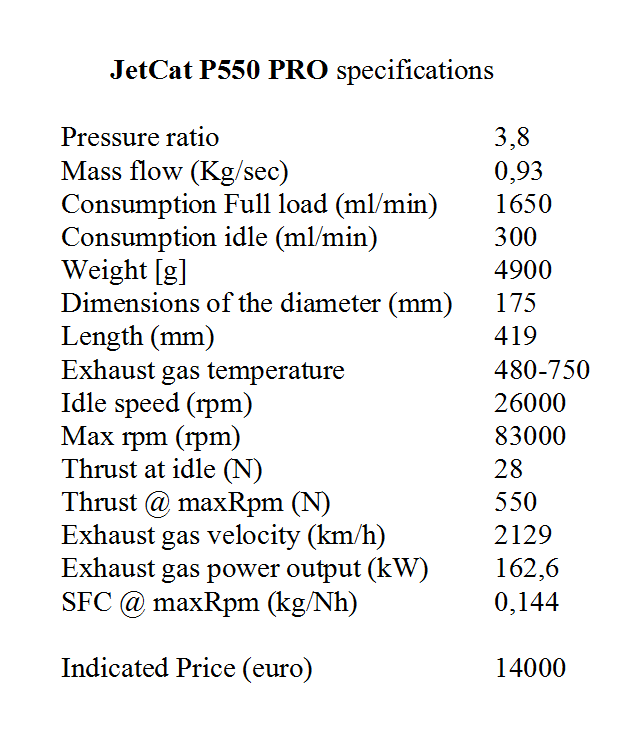
give an idea (26,000rpm idling, 83,000rpm maximum revs).
If the control has to deal with the gyroscopic rigidity, the response is slow and the restore to the right direction is difficult.
You also write:
“upwards force falls away fast and there's a great lateral acceleration swamping the attempted weightshift control
or do we rely on having enough slipstream/airspeed for aerodynamic control to succeed ? (depending on attire ?)
ok (I guess and contrary to my fears) aerodynamic reaction to rotor tilt rate will give some pitch damping ?”
If it takes 1 second to turn from vertical to horizontal, it will also take 1 second to restore to from horizontal back to vertical (hovering). I.e. the fast response is an advantage, not a drawback.
On the other hand, as the bicyclers need not to lean more than a few degrees to control their bikes, similarly the pilot of the Portable Flyer needs not to make extreme corrections, unless they want to make aerobatics.
Applying my last post approach, two seconds is the time required in order the Portable Flyer to make a complete loop (360 degrees turn of the thrust axis).
Supposing the time starts with the thrust straight upwards, the thrust will “look” downwards for only 0.5sec.
In 0.5 seconds and with 2g (20m/sec2) downwards acceleration, the height loss for a complete loop is 2.5m (8 ft).
Besides the above "weight shifting control", the Portable Flyer pilot, from take off to landing, has also full “aerodynamic control”.
If you look carefully (put the reproduction speed at 0.25) at the “wind dancer” youtube video, at 1’:33” she starts rotating about her long axis (yaw) making six complete turns in less than one second; and she cannot use any kind of “weight shifting” control”, just pure “aerodynamic control”.
Thanks
Manolis Pattakos
 .
.
